Estimators that Block Confounding
Here are slides
The next pages introduce three common estimators that can be used to block measured confounding for causal inference: outcome modeling, matching, and weighting. This page provides a brief overview of the motivations of each approach, in a very simple setting.
A simple setting
There are 6 observations. At confounder value 1, 2 out of 3 are treated. At confounder value 2, 1 out of 3 is treated.
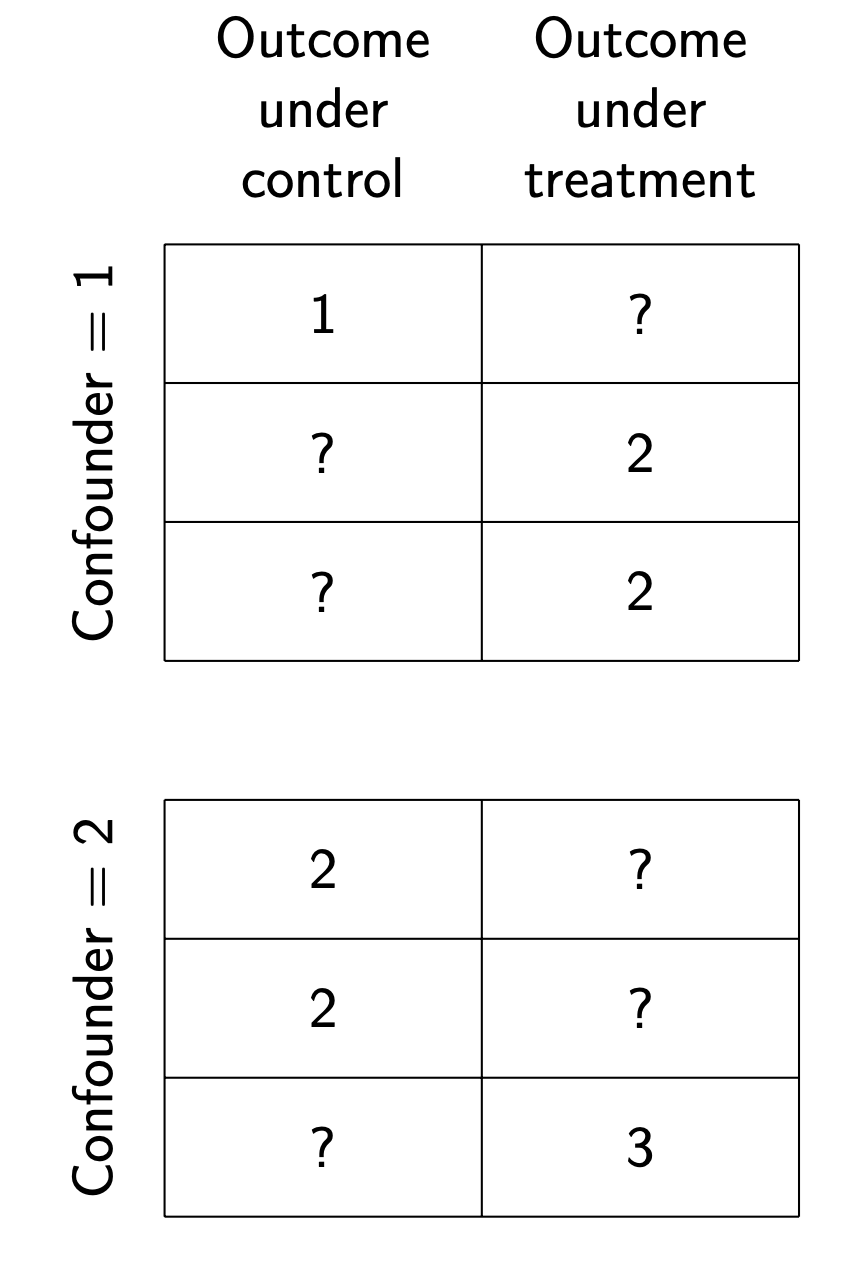
We assume causal identification given the confounder. The causal problem is to use the observed data to learn about the missing values.
Outcome modeling
One strategy is to estimate an outcome model for the conditional mean of the observed outcomes.
\[E(Y\mid A, X) = \alpha + \beta X + \gamma A\]
In these data, we would estimate \(\hat\alpha = 0\), \(\hat\beta = 1\), and \(\hat\gamma = 1\). We could then predict the counterfactual outcomes.

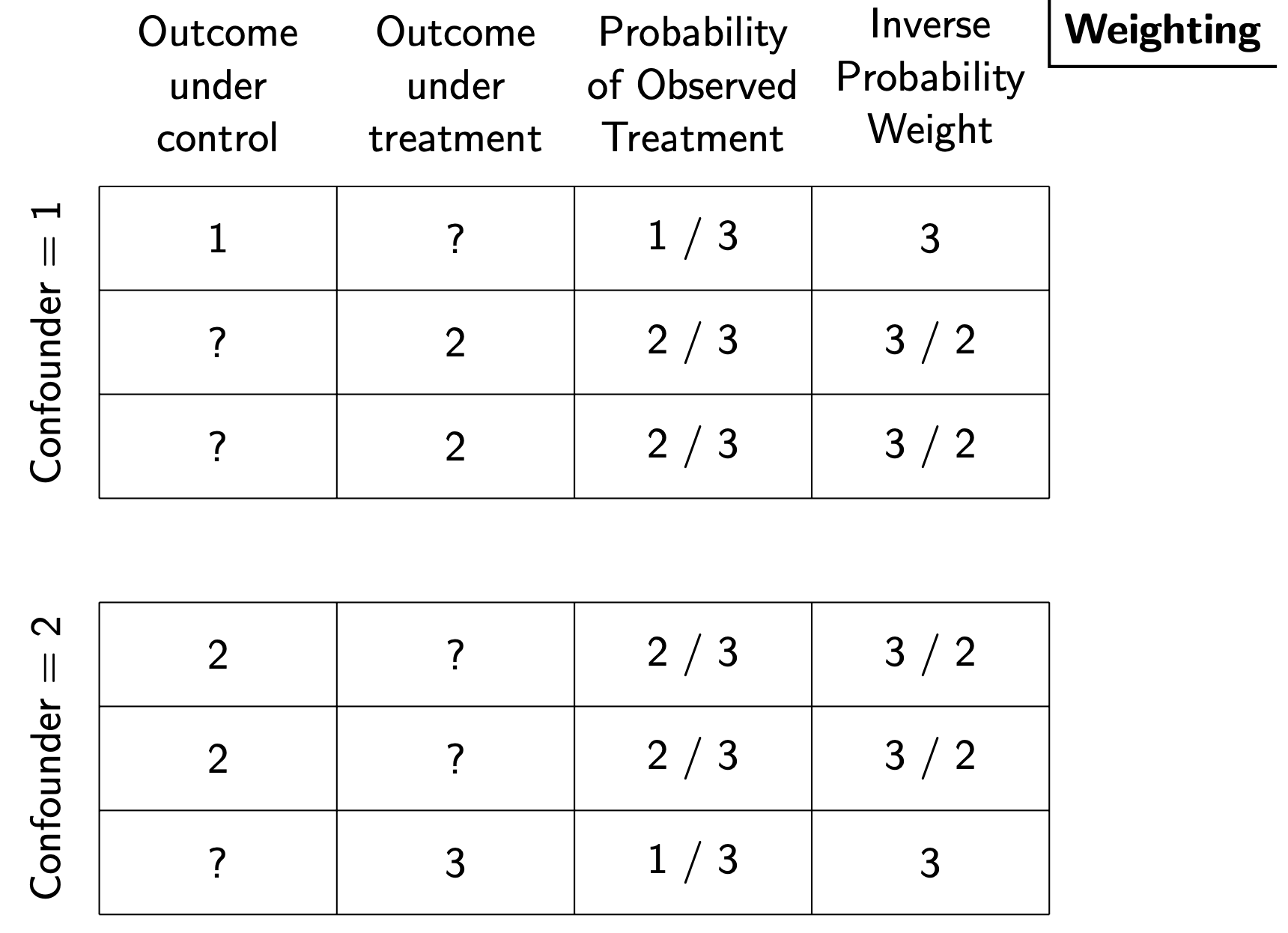
Inverse probability weighting
Another strategy is to consider the treated units as a sample of all units, drawn with unequal probabilities across confounder values. Likewise, for the control units. Just as in sampling we would weight by the inverse probability of sample inclusion, we can weight by the inverse probability of the observed treatment.
Matching
A third is to find for each unit a matched case that had the other treatment condition. We then impute the missing outcome value by the observed outcome of the matched case.
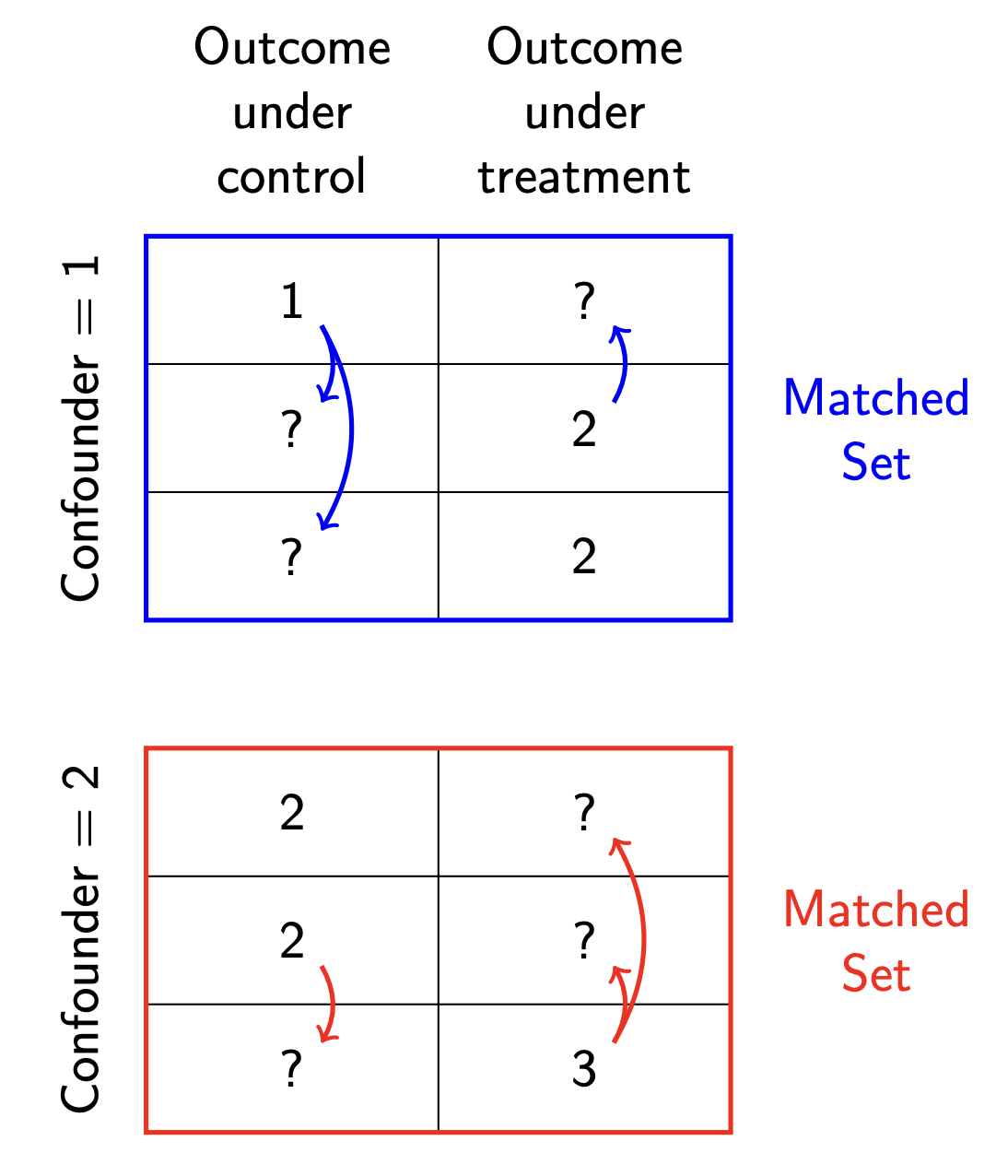
Matching can be conceptualized as a special case of outcome modeling, where the outcome model is a nearest neighbor estimator.